Önümler
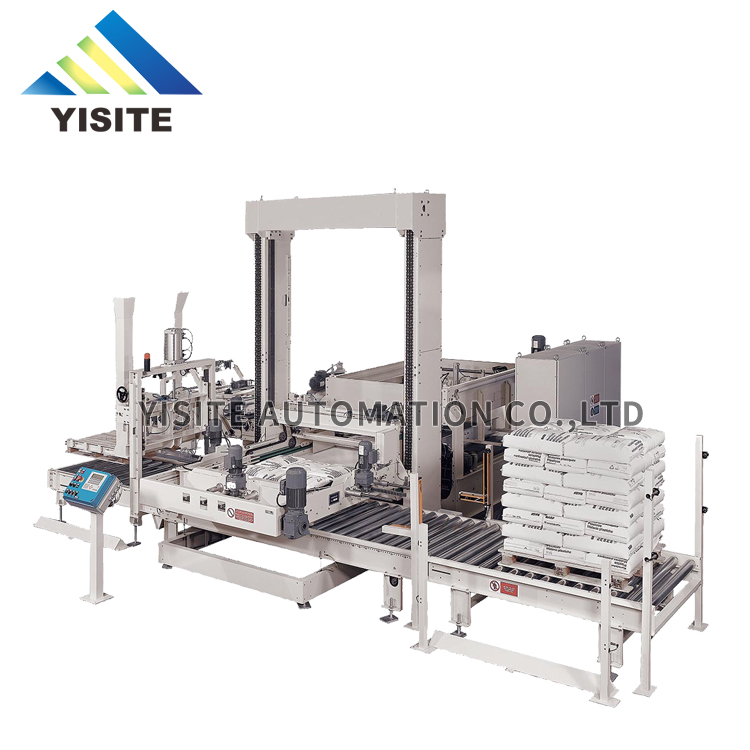
iki sütün haltajyklary ýygnamak paletizatory
Gysga düşündiriş:
iki sütün haltajyklary ýygnamak paletizatory sumkalary işlemekde köp sanly amal üçin ulanylýar. Iň ýaýran programmalar paletde harytlary ýygnamak zerurlygy bilen amallardyr. Enjam önümçilik kuwwatyny artdyrmak bilen bir hatarda gaty el zähmetini çalyşýar. Paletizasiýa maşynlary paletlenen önümiň görnüşine baglylykda köp dürli bolýar.

biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
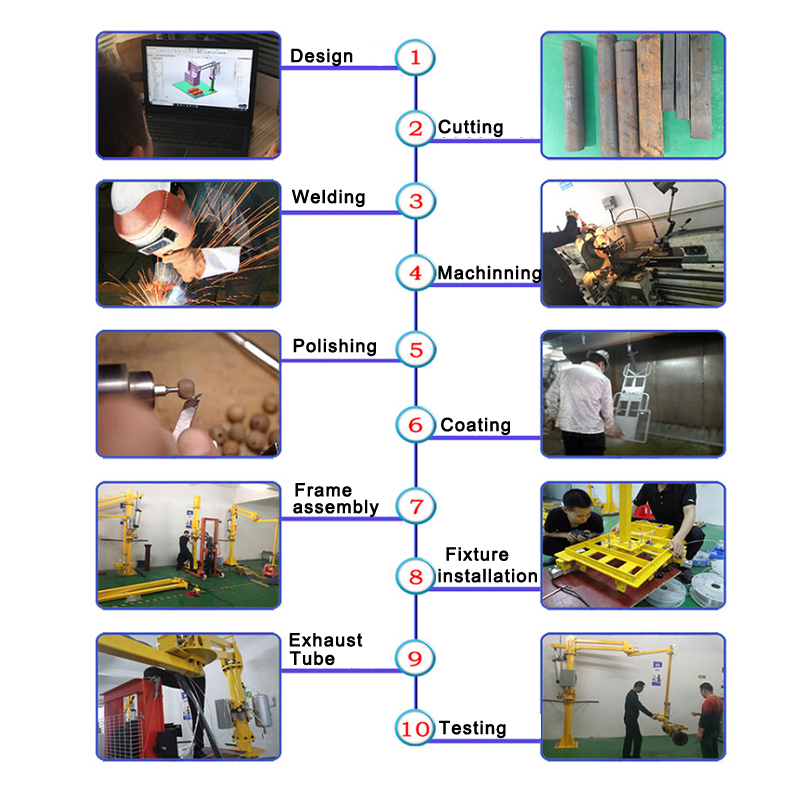
Enjam transport, gurnama, integrasiýa giňişligi we saklamak aňsat bolan iň az talaplary bolan ýönekeý dizaýndyr. Manipulýator dik teleskopiki gol (Z-ok) bilen hereket edýän ýük awtoulagyny (y oky) kesgitleýän gorizontal çarçuwaly (X-ok) portal gurluşyndadyr. Goluň ujunda aýlaw düwmesi (A-ok) oturdylýar. Toplumlaýyn operasiýa ulgamy, hereket tizligi, paletiň ululygy, paletde gaplanan harytlaryň düzümi we ş.m. ýaly funksiýalary aňsatlyk bilen üýtgetmäge mümkinçilik berýär, birnäçe harytlary toparlara bölmek ýa-da sortlamak üçin ýörite manipulýator konfigurasiýasy ulanylyp bilner.
Maşyn ýönekeý programmalar üçin amatly, bu ýerde yzygiderli materiallary gaýtadan işlemek, degirmenler, öý haýwanlary iýmit önümleri, iýmit önümleri, beton, boýag we ş.m. ýaly pes önümçilik kuwwaty bolan paletlerdäki harytlary paletlemek.