
Önümler
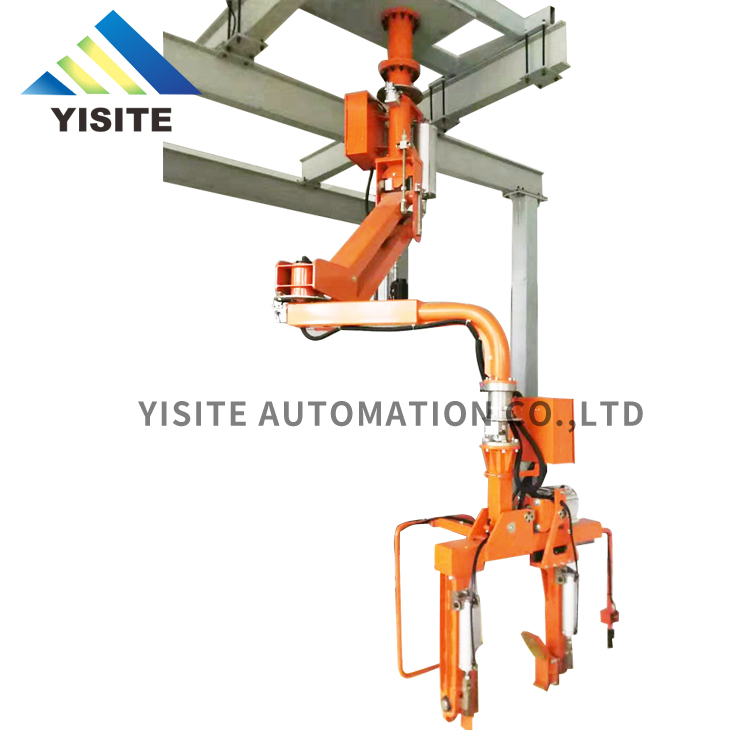


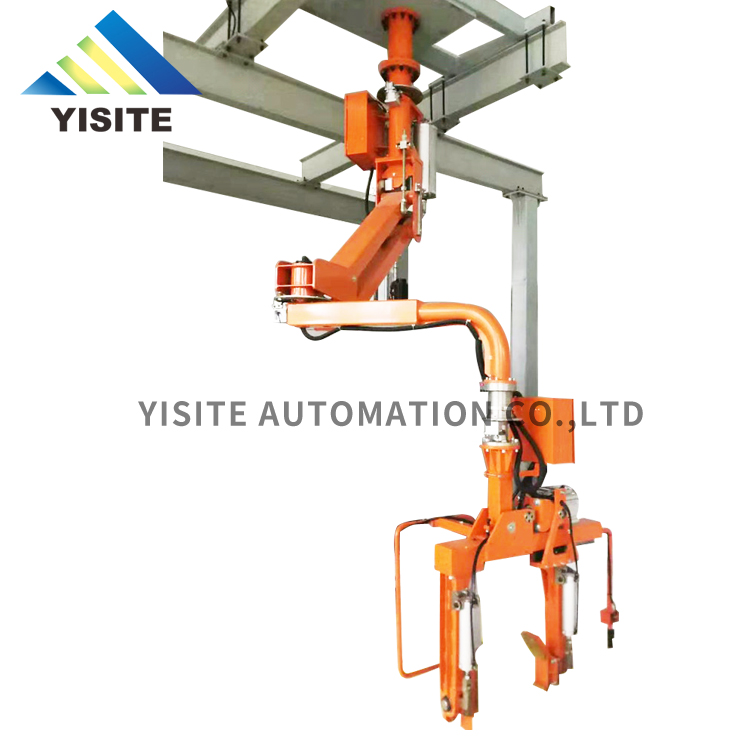
asma Jib Cranes Manipulýator
Gysga düşündiriş:
Asma güýçlendiriji manipulýator gurnama bazasyndan, öý eýesinden we polatdan ýasalan çybykdan, armaturdan ybaratdyr. Esasy goly 360 dereje öwrüp bolýar, ikinji gol çybygyny iş çägine ýetmek üçin 270 dereje öwrüp bolýar we aýlanma goşup biler tormoz mehanizmi. highokary ýygylykly işlemek, ýerleşdirmek, komponentleri ýygnamak we beýleki ýagdaýlar üçin amatly.



biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
Haryt aýratynlyklary
Sorujy käsäni ýa-da manipulýatoryň ujuny anyklamak we silindrdäki gaz basyşyny deňleşdirmek bilen, mehaniki goluň üstündäki ýükleri awtomatiki kesgitläp biler we pnewmatik logika gözegçilik zynjyry arkaly silindrdäki howa basyşyny awtomatiki sazlap biler. Awtomatiki deňagramlylygyň maksady. Işleýän wagty agyr zatlar howada togtadylan ýaly bolup, önümiň duralgasynyň çaknyşmagynyň öňüni alyp biler. Mehaniki goluň iş aralygynda operator ony aňsatlyk bilen yza, çepe we aşak süýşürip biler. ýagdaýy we adamyň özi aňsatlyk bilen işläp bilýär. Şol bir wagtyň özünde, pnewmatiki zynjyryň tötänleýin obýektiň ýitmeginiň öňüni almak we basyşy ýitirmek ýaly zynjyrdan goramak funksiýalary hem bar.

Asma güýji manipulýatorynyň iş prinsipi we tertibi:
Sorujy käsäni ýa-da manipulýatoryň ujuny anyklamak we silindrdäki gaz basyşyny deňleşdirmek bilen, mehaniki goluň üstündäki ýükleri awtomatiki kesgitläp biler we pnewmatik logika gözegçilik zynjyry arkaly silindrdäki howa basyşyny awtomatiki sazlap biler. awtomatiki deňagramlylygyň maksady. Işleýän wagtyňyz agyr zatlar howada togtadylan ýalydyr, bu önümiň duralgasynyň çaknyşmagynyň öňüni alyp biler. Mehaniki goluň iş aralygynda operator ony aňsatlyk bilen yza, çepe we aşak islendik ýere geçirip biler. Şol bir wagtyň özünde, pnewmatiki zynjyryň tötänleýin obýektiň ýitmeginiň öňüni almak we basyşy ýitirmek ýaly zynjyrdan goramak funksiýalary hem bar.
Aýratynlyklary
Iň köp ýük. 900 Kg
Maks hereket radiusy: 4500 mm
Dik syýahat: 0,5m / min
Dolandyryş ulgamy: 2200 mm
Dolandyryş ulgamy: howa doly pnewmatik
Üpjünçilik: gysylan howa (40 µm) , ýag ýok
Iş basyşy: 0.7 ÷ 0.8 Mpa
Iş temperaturasy: + 0 ° a + 45 ° C.
Sesi:howany sarp etmek: Her sikl üçin 100 Nl ÷ 400 N.
Aýlanma: Sütün şahasy we armatura şahasy 360 ° üznüksiz aýlanma, orta mil 300 ° üznüksiz aýlanma







