
Önümler



sorujy käse aýna bilen işleýän pnewmatik manipulýator
Gysga düşündiriş:
Pnewmatik manipulýator, manipulýator, balans kran, balans güýçlendiriji, el bilen ýük göteriji maşyn (ýokarda aýdylanlar professional däl, ýöne Hytaýda meşhur) diýlip hem atlandyrylýar, elektrik enjamlaryny material işlemek we gurnamak we zähmet tygşytlamak üçin ulanylýan romandyr.

sorujy käse aýna bilen işleýän pnewmatik manipulýator, operatoryň kosmosda hereket edýän ýerini deňleşdirip bilýän agyr obýekti itekläp we çekip biljekdigi üçin güýç balans ýörelgesini ulanýar. Agyr zat göterilende ýa-da peselende ýüzýän ýagdaýy emele getirýär we däl iş güýji gaz ýoly bilen kepillendirilýär (gaýtadan işlemek prosesi we dizaýn çykdajylaryna gözegçilik, iş güýji höküm standarty hökmünde 3 kg-dan az) iş güýji iş böleginiň agramyna täsir edýär. Tejribeli işlemezden, operator agyr zady el bilen itip we çekip biler we agramy kosmosdaky islendik ýagdaýda dogry goýup biler.

biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
- 1. Gurluşy: Pnewmatik güýjüň doly manipulýatory, esasan, gurnama ammaryndan we guraldan ybaratdyr.2. Gurnama binýady aşakdakylara bölünýär: 1. Sütün berkidildi 2. Esasy ykjam 3. potolok asma berkidilen 4Ceiling asma ykjam
3. Gurluş: Müşderi tarapyndan berlen eseriň daşky görnüşine görä adatça düzülýär.1. çeňňek görnüşi; 2. tutmak görnüşi; 3. berkidiş görnüşi; 4. içerki ýokarlanma görnüşi; 5. göteriş görnüşi; 6. tutmagyň görnüşi; 7. tutawajyň öwrülişigi (90 ° ýa-da 180 °) 0; 8. wakuum adsorbsiýasy; 9. wakuum adsorbsion öwrüm öwrülişigi (flip 90 ° ýa-da 180 °) we beýlekiler, ýörite saýlanan we işlenip düzülen we gowy ulanylyş effektine eýe boldy.
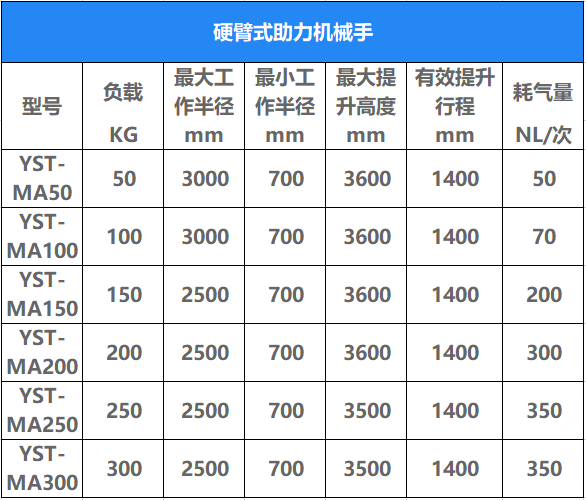
4. Hoster eýesi: esasan deňagramly silindrden we gaty köp ýapyk kantilwerden durýar we esasy parametrleri göterijilik ukyby we hyzmat radiusy.
Önümiň beýany
sorujy käse aýna bilen işlemek Pnewmatik manipulýatorlar asylan ýükler bilen işlemek üçin döredildi. Şol sebäpli senagat tehnikalaryny ýüklemek we düşürmek üçin düýbünden zerurdyr. Pnewmatik esbaplar we ýörite esbaplar sebäpli diňe bölekleri götermek däl, eýsem aýlanmak, garynjalary tersine öwürmek ýa-da has ýönekeý görnüşde hem mümkin.
Önüm aýratynlyklary
1. Pnewmatik güýjüň doly manipulýatory, esasan, gurnama ammary we guraldan durýar.
2. Gurnama binýady aşakdakylara bölünýär: 1. Sütün berkidildi 2. Esasy ykjam 3. potolok asma berkidilen 4Ceiling asma ykjam
3. Gurluş: Müşderi tarapyndan berlen eseriň daşky görnüşine görä adatça düzülýär.1. çeňňek görnüşi; 2. tutmak görnüşi; 3. berkidiş görnüşi; 4. içerki ýokarlanma görnüşi; 5. göteriş görnüşi; 6. tutmagyň görnüşi; 7. tutawajyň öwrülişigi (90 ° ýa-da 180 °) 0; 8. wakuum adsorbsiýasy; 9. wakuum adsorbsion öwrüm öwrülişigi (flip 90 ° ýa-da 180 °) we beýlekiler, ýörite saýlanan we işlenip düzülen we gowy ulanylyş effektine eýe boldy.
4. Hoster eýesi: esasan deňagramly silindrden we gaty köp ýapyk kantilwerden durýar we esasy parametrleri göterijilik ukyby we hyzmat radiusy.







