Önümler


goşa paletli gantry palletizator
Gysga düşündiriş:
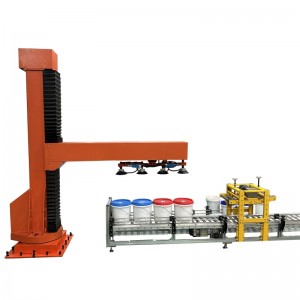
goşa palet gantry paletizator, gapdal itekleýji ýa-da pes derejeli saklaýjy hökmünde hem tanalýar, esasan kartonlarda, sumkalarda (tüwi, iýmit, himiki dökün we ş.m.), film bukjasynda (suw, içgiler, miwe suwy we ş.m.) ulanylýar. ), çelekler we ş.m.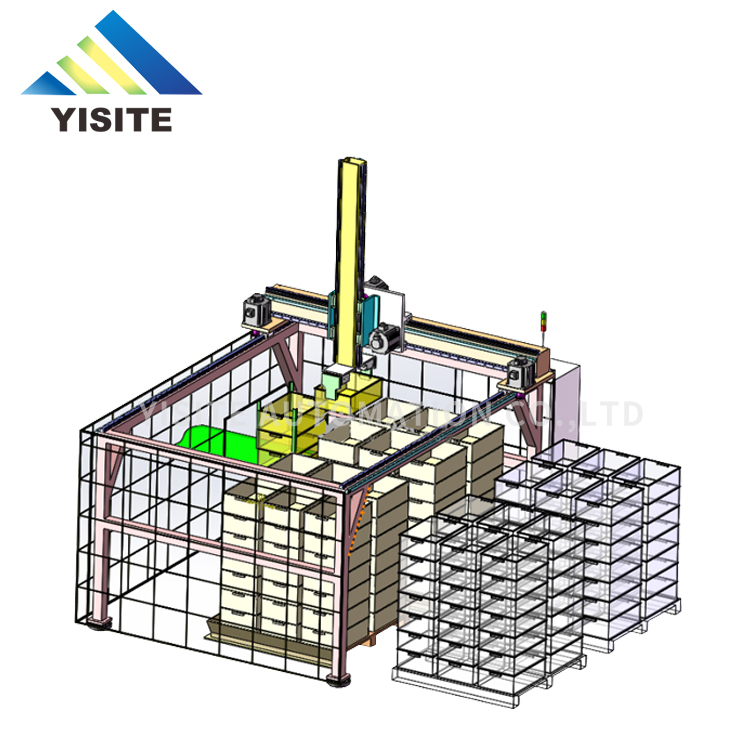
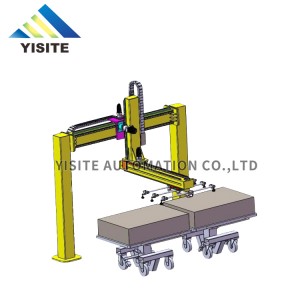
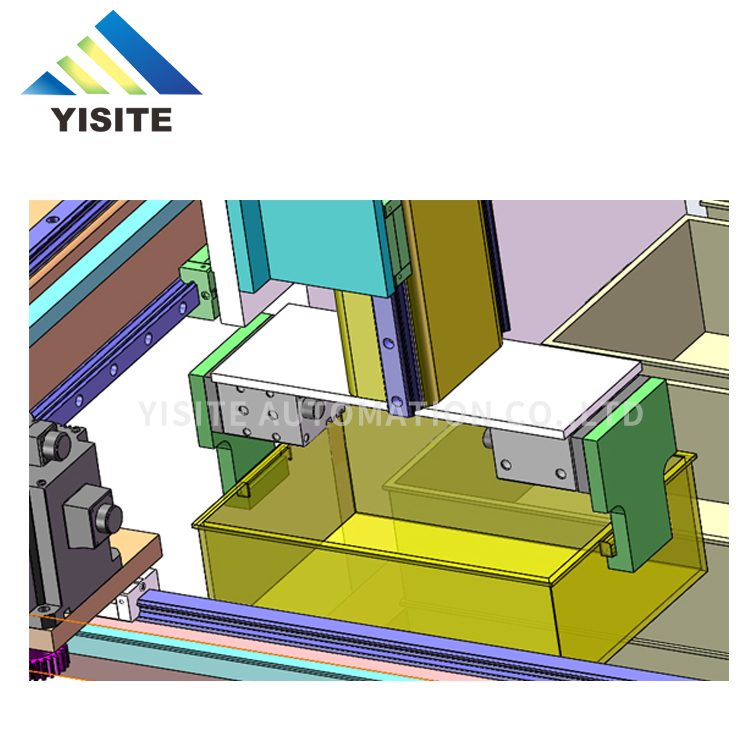
goşa palet gantry palletizatoryň girişi: Paletizatoryň esasy bölümi öňe we yza gidip bilýän trolleýden, çarçuwadan we ýokary we aşak göterilip bilinýän göteriji platformadan durýar. Ululygy we düzülişi düzülip bilner.

biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
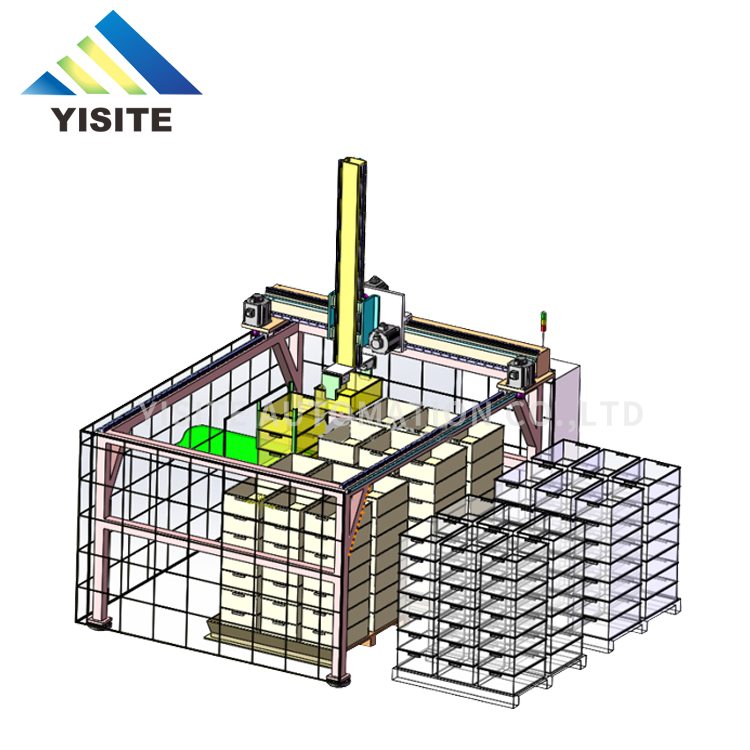
Gantry stackeriniň aýratynlyklary
1. Önümçiligiň tizligini, näsazlygynyň sebäbini we ýerleşişini görkezip bilýän we ýokary derejede awtomatlaşdyryş derejesini görkezip bilýän adam-kompýuter gepleşiklerini amala aşyrmak üçin sensor ekran operasiýasyny ulanyp, gantry stacking palletizatory. PLC-den peýdalanmak, tertipleşdirilen kod gatlaklarynyň sany, stack üpjünçiligi we akymyna gözegçilik edip bolýar.
2. Daşary ýurtlardan getirilen elementler, durnukly işlemek, ygtybarly öndürijilik we berk çydamlylyk.
3. Gorag desgalary üpjün edilýär. Gapak gapy açylanda, maşyn işleýär.
4. ingygyndy tertibini sazlamak amatly we ýönekeý bolup, duýgur ekranda amala aşyrylyp bilner.
5. ingygyndy böleklerini çalyşmazdan birnäçe ýygnamak usuly tamamlanyp bilner.
6. Has täsirli we has çalt 2 tarelka bilen gabat gelýär
Doly awtomatiki staletizatoryň tehniki parametrleri
Doly awtomatiki staletizatoryň tehniki parametrleri:
Paltizasiýa ukyby: 5 guty / min
Toplama beýikligi: 4 -6 gatlak
Elektrik üpjünçiligi: 4KW töweregi 380V, 50 / 60HZ
Gaz çeşmesiniň basyşy: 6Kg / cm², takmynan 400L / min
Mehaniki ululygy: L2550 * W1950 * H3200mm (hakyky ululygyna bagly)
PLC: Mitsubishi (Japanaponiýa)
Fotoelektrik gözegçiligi: Omron (Japanaponiýa)
Encyygylyk öwrüji: Mitsubishi (Japanaponiýa)
Pnewmatiki elementler: AirTac (Taýwan)
Enjamyň agramy: takmynan 2000 kg

Bölüm bölümi
Ackeňil palletizasiýa üçin el bilen kesgitlenen ýere el bilen ýerleşdirilýär.
stack tagtasynyň çykaryjy enjamy.
Akylly, robot we torlaýyn önümçilik ýerlerini üpjün etmek üçin robot palletizatoryny islendik önümçilik liniýasyna birleşdirip bolýar. Piwo, içgi we azyk senagatynda dürli amallar üçin palletizasiýa logistikasyny durmuşa geçirip biler. Multfilmlerde, plastik gutularda we çüýşelerde giňden ulanylýar. Sapaklar, sumkalar, deprekler, film haltalary we doldurma önümleri. Üç sany doldurgyç liniýasy we ş.m. bilen enjamlaşdyrylan we dürli çüýşeleri we haltalary paletleşdirýär. Paletizasiýa maşynynyň awtomatiki işlemegi awtomatiki iýmitlendirmek, geçirmek, sortlamak, gaplamak, ýygnamak, götermek, iýmitlendirmek, ýerleşdirmek we çykmak ýaly böleklere bölünýär.