
Önümler


elektrik jib kran Robot Arm manipulýatory
Gysga düşündiriş:
elektrik jib kran Robot Arm manipulýatoryna kantilýwer göteriji kran, ýönekeý gurluş, ygtybarly we ygtybarly diýilýär. Aralyk köp gatnaw ulaglary üçin amatly. Beýleki adaty göteriji enjamlara garanyňda köp artykmaçlygy bar. lift, amatly we meşhur kiçi göteriji enjamdyr.

elektrik jib kran Robot Arm manipulýatory sütünden, swing golundan, aýlawly hereketlendiriji enjamdan we göteriji enjamlardan ybarat ýeňil iş güýji manipulýatorydyr. Lighteňil agram, uly aralyk, hereket, çep we sag göni hereket etmek üçin kantilwerde göteriji enjamlar we agyr zatlary götermek.
elektrik jib kran Robot Arm manipulýatory, önümçiligiň netijeliligini ýokarlandyrmak we zähmet çykdajylaryny azaltmak üçin operatorlara tekiz, çalt we takyk işlemegi we saklamagy amala aşyrmaga kömek edýär.

biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
Kantileweriň asmagynyň aýratynlyklary
1. Alýumin garyndy görnüşli gol ýa-da polat kantilwer saýlaň;
2.Modully gurnama, çalşylýan kantilweriň uzynlygy;
3. 0-360 ° burç burçy;
4.Eňil gurnama we çalt.


Kantileweriň asmagynyň artykmaçlyklary
1. kantilewer häzirki zaman önümçiligi üçin ýeňil göteriji enjamlaryň täze nesli. Üzükli elektrik zynjyrynyň ýokary ygtybarlylygy bilen gysga aralyk, ýygy-ýygydan ulanmak we güýçli götermek üçin amatlydyr, ýokary netijelilik, energiýa tygşytlamak, kynçylyk tygşytlamak, kiçi meýdan, aňsat işlemek we tehniki hyzmat etmek ýaly artykmaçlyklara eýedir.
2. Kantilwer has çeýe we giň uýgunlaşma bolup, önümçilik liniýasynyň yzygiderli akymyny üpjün edip biljek täsirli we awtomatiki önümçilik liniýasynda zerur aýratyn gyssagly göteriji enjamdyr.
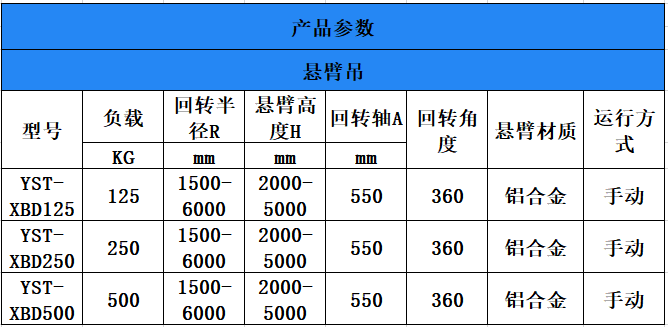
| Model | Adük | R / mm | H / mm | A / mm | Aýlanma | Material | Işlemek |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
Önümiň beýany
Bilelikdäki robotlar, umumy, bilelikdäki iş ýerinde adam işçileri bilen bilelikde howpsuz işlemek üçin gurlan robot awtomatlaşdyrmagyň bir görnüşidir. Köp programmalarda bilelikde işleýän robot, adam işgäri has çylşyrymly we pikirlenýän işleri ýerine ýetirýän bolsa, gaýtalanýan, pes meseleler üçin jogapkärdir. Bilelikdäki robotlaryň takyklygy, iş wagty we gaýtalanmagy adam işgäriň akyl we meseläni çözmek endiklerini doldurmak üçin döredildi.
Bilelikdäki robot dizaýnlary, senagat robot kärdeşlerinden düýpgöter tapawutlanýar. Tegelek gyralary, güýç çäklendirmelerini we ýeňil agramlary öz içine alýan robotlar, ilkinji nobatda howpsuzlyk üçin döredildi. Hyzmatdaş robotlaryň köpüsi, işçiler bilen çaknyşmazlyk üçin bir topar datçikler, meýilleşdirilmedik aragatnaşyk görnüşi ýüze çyksa ýapylmak üçin howpsuzlyk protokollary bilen üpjün edilendir.
Önüm aýratynlyklary
1. Alýumin garyndy görnüşli gol ýa-da polat kantilwer saýlaň;
2.Modully gurnama, çalşylýan kantilweriň uzynlygy;
3. 0-360 ° burç burçy;
4.Eňil gurnama we çalt.









