
Önümler

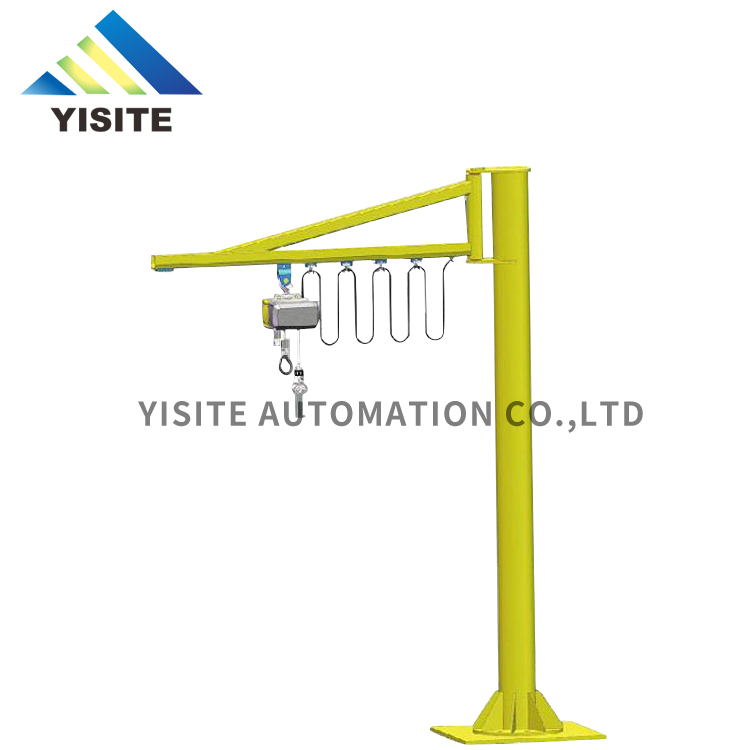
Elektrik göteriji balans robot gol krany
Kantileweriň asmagynyň aýratynlyklary
1. Alýumin garyndy görnüşli gol ýa-da polat kantilwer saýlaň;
2.Modully gurnama, çalşylýan kantilweriň uzynlygy;
3. 0-360 ° burç burçy;
4.Eňil gurnama we çalt.

Kantileweriň asmagynyň artykmaçlyklary
1. kantilewer häzirki zaman önümçiligi üçin ýeňil göteriji enjamlaryň täze nesli. Üzükli elektrik zynjyrynyň ýokary ygtybarlylygy bilen gysga aralyk, ýygy-ýygydan ulanmak we güýçli götermek üçin amatlydyr, ýokary netijelilik, energiýa tygşytlamak, kynçylyk tygşytlamak, kiçi meýdan, aňsat işlemek we tehniki hyzmat etmek ýaly artykmaçlyklara eýedir.
2. Kantilwer has çeýe we giň uýgunlaşma bolup, önümçilik liniýasynyň yzygiderli akymyny üpjün edip biljek täsirli we awtomatiki önümçilik liniýasynda zerur aýratyn gyssagly göteriji enjamdyr.
| Model | Adük | R / mm | H / mm | A / mm | Aýlanma | Material | Işlemek |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
Önümiň beýany
Elektrik göteriji deňagramlylyk robot ýaragly kran ýeňil material göteriji enjamdyr. Artykmaç ýükden goramak we gorag enjamlaryny çäklendirmek bilen spiral götermek mehanizmini kabul edýär. Iş stansiýalarynda, duralgalarda we ammarlarda maşyn böleklerini ýygnamak üçin gysga aralyk, ýokary ýygylyk we intensiw göteriş işleri üçin amatly.
Önümiň beýany
Ady: Senagat zerurlyklaryňyza takyk robot ýaraglar.
Robot gollarymyz, önümçilik amallaryňyzy tertipleşdirmek üçin ajaýyp çözgütdir. 6 ok hereketi we 20 kilograma çenli ýük göterijilik ukyby bilen, ellerimiz takyklyk we takyklyk bilen köp sanly işi ýerine ýetirmäge ukyply. Robot gollarymyz metallar, plastmassalar we kompozitler ýaly dürli materiallary dolandyryp biler.









