
Önümler


150 kg howa pnewmatik manipulýatory
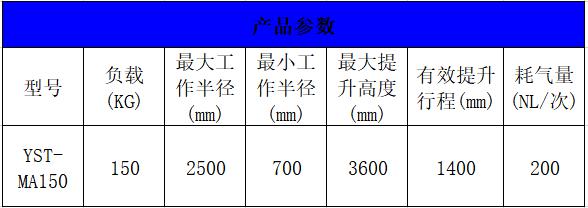
- 1. Robotyň parametrleri
- Iň ýokary howpsuzlyk ýük: 300kg
- Iň ýokary dik göteriş: 2250 mm
- Gaz sarp edilişi: 160L / sag
- Ulgam görnüşi: doly pnewmatik deňagramlylyk
- Kuwwat çeşmesi: arassa, gury gysylan howa
- Bilelikdäki wilka 360 ° aýlanmak (tormoz mehanizmi bilen)
- 2. El bilen gurmagyň mehaniki usuly
- Fixeder kesgitlenen, ýerüsti ykjam (adam, elektrik), asma berkitme, demir ýol asma ykjam (adam, elektrik).
- 3. Güýç manipulýatory Gaty gol manipulýatory gurnama binýadyndan, esasy enjamdan (esasy sütün, keseligine gol we bogun), dolandyryş ulgamy (silindr, pnewmatik komponentler) we armatura. Highokary ýygylykly işlemek, takyk ýerleşiş, komponent ýygnamak we beýleki ýagdaýlar.
Habaryňyzy şu ýere ýazyň we bize iberiň









