
Önümler


Hyzmatdaşlyk robot ýarag manipulýatory
Kantileweriň asmagynyň aýratynlyklary
1. Alýumin garyndy görnüşli gol ýa-da polat kantilwer saýlaň;
2.Modully gurnama, çalşylýan kantilweriň uzynlygy;
3. 0-360 ° burç burçy;
4.Eňil gurnama we çalt.


Kantileweriň asmagynyň artykmaçlyklary
1. kantilewer häzirki zaman önümçiligi üçin ýeňil göteriji enjamlaryň täze nesli.Üzükli elektrik zynjyrynyň ýokary ygtybarlylygy bilen gysga aralyk, ýygy-ýygydan ulanmak we güýçli götermek üçin amatlydyr, ýokary netijelilik, energiýa tygşytlamak, kynçylyk tygşytlamak, kiçi meýdan, aňsat işlemek we tehniki hyzmat etmek ýaly artykmaçlyklara eýedir.
2. Kantilwer has çeýe we giň uýgunlaşma bolup, önümçilik liniýasynyň yzygiderli akymyny üpjün edip biljek täsirli we awtomatiki önümçilik liniýasynda zerur aýratyn gyssagly göteriji enjamdyr.
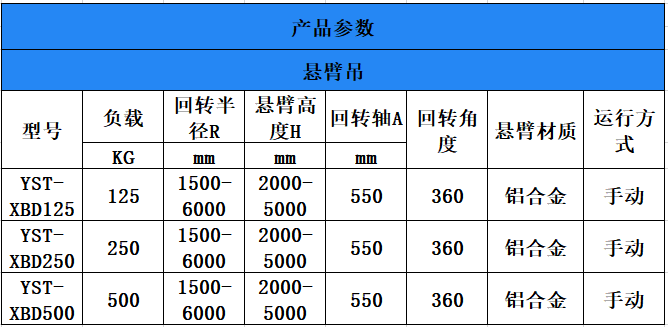
| Model | Adük | R / mm | H / mm | A / mm | Aýlanma | Material | Işlemek |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | alýumin garyndysy | El |
Önümiň beýany
Bilelikdäki robotlar, umumy iş ýerinde adam işçileri bilen bilelikde howpsuz işlemek üçin gurlan robot awtomatizasiýasynyň bir görnüşidir.Köp programmalarda bilelikde işleýän robot, adam işgäri has çylşyrymly we pikirlenýän işleri ýerine ýetirýän bolsa, gaýtalanýan, pes meseleler üçin jogapkärdir.Bilelikdäki robotlaryň takyklygy, iş wagty we gaýtalanmagy adam işgäriň akyl we meseläni çözmek endiklerini doldurmak üçin döredildi.
Bilelikdäki robot dizaýnlary, senagat robot kärdeşlerinden düýpgöter tapawutlanýar.Tegelek gyralary, güýç çäklendirmelerini we ýeňil agramlary öz içine alýan robotlar, ilkinji nobatda howpsuzlyk üçin döredildi.Hyzmatdaş robotlaryň köpüsi, işçiler bilen çaknyşmazlyk üçin bir topar datçikler, meýilleşdirilmedik aragatnaşyk görnüşi ýüze çyksa ýapylmak üçin howpsuzlyk protokollary bilen üpjün edilendir.
Önüm aýratynlyklary
1. Alýumin garyndy görnüşli gol ýa-da polat kantilwer saýlaň;
2.Modully gurnama, çalşylýan kantilweriň uzynlygy;
3. 0-360 ° burç burçy;
4.Eňil gurnama we çalt.









