
Önümler

karton guty gantry awto palletizator
Gysga düşündiriş:
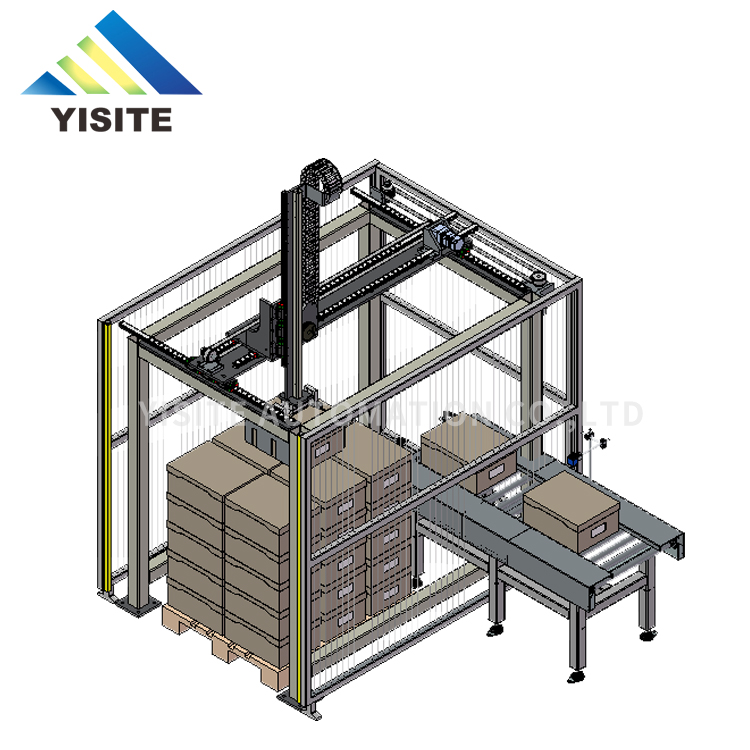
karton guty gantry awto paletizator önüminiň tanyşdyrylyşy: Paletizatoryň esasy bölümi öňe we yza gidip bilýän trolleýden, çarçuwadan we ýokary we aşak göterilip bilinýän daşaýjy platformadan durýar. Ululygy we düzülişi düzülip bilner.
karton guty gantry awto palletizator, induksiýa mehanizmi bilen enjamlaşdyrylan tutma hereketi obýekti awtomatiki duýup biler we gözegçilik merkezine obýekti ele almak üçin pnewmatik tutawaç, sazlanylýan basyş, basyş bufer klapan bilen enjamlaşdyrylan ýörite dizaýn bilen.

biz hakda

Biz ýöriteleşdirilen awtomatlaşdyrylan enjam öndüriji. Önümlerimizde depalletizator, gaplaýyş enjamyny saýlamak we ýerleşdirmek, palletizator, robot integrasiýa programmasy, manipulýatorlary ýüklemek we düşürmek, karton emele getirmek, karton möhürlemek, palet dispenseri, gaplaýyş enjamy we yzky gaplama önümçilik liniýasy üçin beýleki awtomatlaşdyryş çözgütleri bar.
Zawod meýdany 3500 inedördül metr töweregi. Esasy tehniki toparyň mehaniki awtomatlaşdyryşda ortaça 5-10 ýyl tejribesi bar, şol sanda 2 mehaniki dizaýn inerseneri. 1 programmirleme inereneri, 8 gurnama işgäri, satuwdan soň 4 adam we beýleki 10 işçi
Principleörelgesimiz “ilki bilen müşderi, ilki bilen hil, ilki bilen abraý”, müşderilerimize hemişe “önümçilik kuwwatyny ýokarlandyrmaga, çykdajylary azaltmaga we hilini ýokarlandyrmaga” kömek edýäris, maşyn awtomatlaşdyryş pudagynda iň ýokary üpjün ediji bolmaga çalyşýarys.
Truss XYZ doly awtomatiki karton bos stacking manipulýatory
1. Staker enjamynyň düzümi
Paletizasiýa enjamy, awtomatiki iýmit ýerleşdiriş ulgamy bilen enjamlaşdyrylan gurnama çarçuwasyndan, ýerleşiş ulgamyndan, sero sürüjilik ulgamyndan, dolandyryş ulgamy, elektrik dolandyryş we paýlaýyş ulgamy, howpsuzlygy goramak enjamy we ş.m.
2. Maşyn dakmak üçin berkitme
Stakeriň hereket tizligi gaty çalt bolany üçin, başlangyç ýagdaýy gurnama çarçuwasyna uly täsir edýär. Gurluşyň kadaly işlemegini üpjün etmek üçin gurnama çarçuwasy gaty berk bolmaly, şonuň üçin kebşirlenen polat çarçuwanyň gurluşyny taýýarladyk goldaw çarçuwasy.
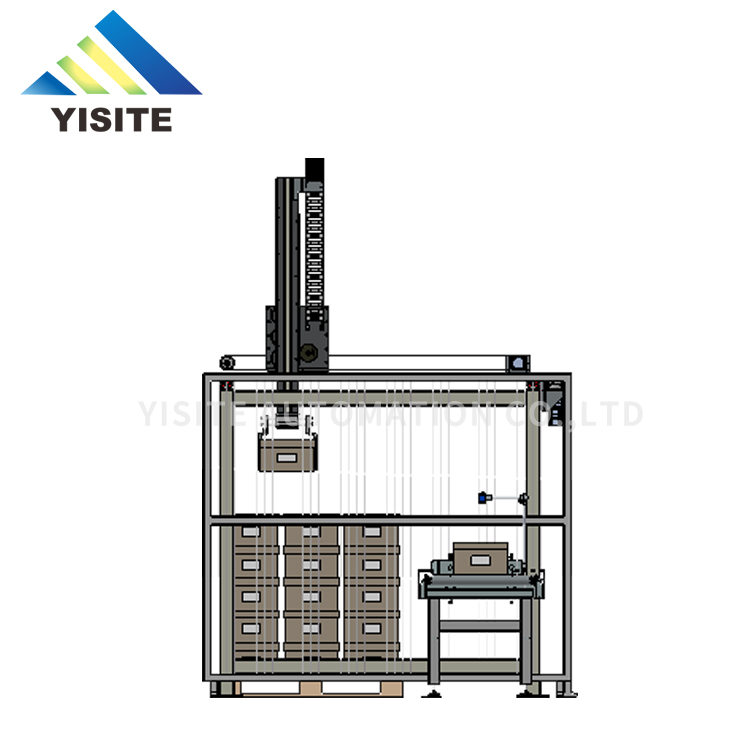
3. Stacker palletizer maşyny ýerleşdiriş ulgamy
Stakeriň ýerleşdiriş ulgamy ähli enjamlaryň özenidir, kaaskawa kompaniýasynyň (Japanaponiýa) önümidir, çalt hereket tizligi we gaýtalanma takyklygy ýokary, X, Y, Z sinhron diş guşagyny geçirmek üçin üç koordinat, bir koordinat Gaýtalama ýerleşdiriş takyklygy 0,1mm, çalt çyzykly hereket tizligi: 1000 mm / s. X oky, uzynlygy 3000mm we uzynlygy 1935mm bolan ýeke-täk ýerleşiş ulgamy. Sinhron geçiriji iki ýerleşiş ulgamynyň sinhron hereketini üpjün edýär we 1500W sero hereketlendirijisi bilen hereket edýär.
Iki pozisiýa ulgamyny ulanyp, Y oky. Şeýle uly kesişli ýerleşiş bölüminiň, esasan, Y okunyň orta asma gurluşy bilen iki taraplaýyn goldaw bolmagydyr. Saýlanan kesiş ýeterlik bolmasa, robot hereketiniň durnuklylygy kepillendirilmez we ýokary tizlikde hereket edende robot titrär. Iki sany ýerleşiş bölümi Z-oky ortada we deňagramlykda kesmek üçin gapdaldan ulanylýar. ýük gowy. Bu gurnama tertibi gaty gowy durnuklylyga eýedir. Iki ýerleşiş ulgamy, sürüjiniň momentine we inersiýasyna gabat gelmek üçin ýokary takyklykly planeta dişli reduktory bilen enjamlaşdyrylan 1500W serw hereketlendirijisi bilen dolandyrylýar.
Z-ok ýerleşdiriş ulgamy berk we durnukly. Önümde adatça süýşüriji we umumy ýokary we aşak hereket bar. Sero hereketlendirijisi uly agyrlyk we tizlenme güýjüni ýeňip geçmeli we has uly güýje mätäç bolan obýekti çalt ösdürmeli. Iş ýüzünde, ýokary takyk planetar dişli reduktor bilen enjamlaşdyrylan 2000W serw motoryny saýladyk. Ok bir öwrüm okydyr.
4. Servo sürüjisi ulgamy
Sanly funksiýaly servo hereketlendirijini ulanyp, gaplaýjy manipulýator enjamy. Her motor hereketlendirijisi servo motor we reduktor, dört servo motor we dört reduktor, şol sanda gulp servo hereketlendirijisi bolan dik motor bilen enjamlaşdyrylandyr.
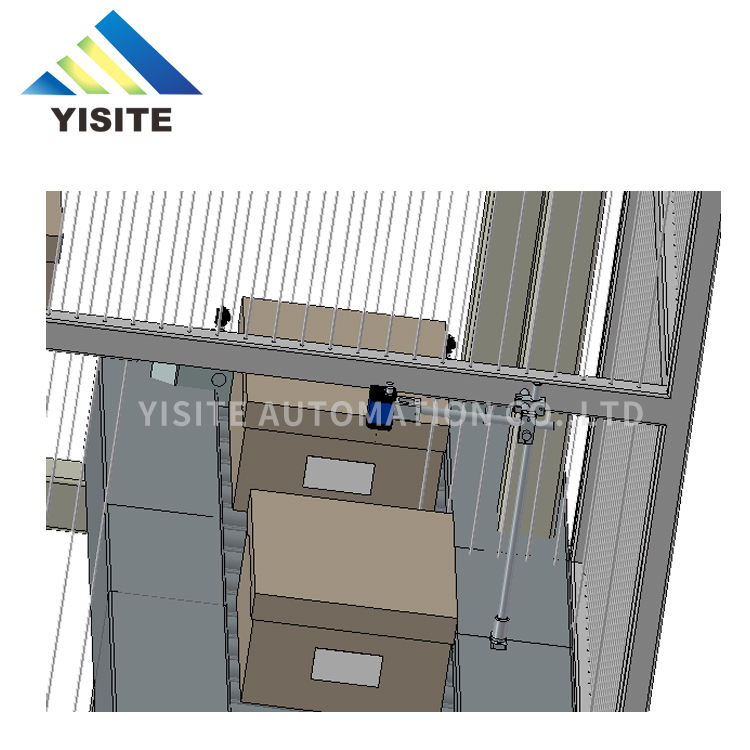
5. Stacker tutawajy
Pnewmatik tutawajyň ýörite dizaýny, sazlanylýan basyş, basyş bufer klapan bilen enjamlaşdyrylan, induksiýa mehanizmi bilen enjamlaşdyrylan tutma hereketi obýekti awtomatiki duýup biler we obýektiň tutulmagy üçin dolandyryş merkezine habar berer.
6, dolandyryş ulgamy
Dolandyryş ulgamy uly PLC we duýgur ekrandan durýar. Ulgam güýçli programmirleme mümkinçiliklerine eýedir. Palletizasiýa etmegiň dürli modelleri bilen ulgam dürli artefakt programmalaryny öňünden kesgitläp biler we degişli programmany çalyşmak sensor ekranynda işledilip bilner.
7, howpsuzlyk enjamy
Enjamda näsazlyk we duýduryş funksiýasy bar we her bir näsazlyk belli bir ýeri takyk görkezip biler, kemçilikleri ýok etmek aňsat we çalt, esasanam şulary öz içine alýar: robotlaryň çaknyşmagyny goramak funksiýasy; ýeri kesgitlemek üçin iş bölegi gurmak; ýeňil ekran howpsuzlygyny goramak.
Tehniki parametrler
1. Maşyn modeli: YST-MD1500
2. ingygyndy kuwwaty: 200-500 guty / H.
3. Çarçuwaly: SS41 (A3 polat sanjym plastmassa bejergisi) şahasy S45C polat
4. Kuwwaty: AC, 3 faza, 380V, 9KW 50HZ
5. Howanyň sarp edilişi: 500NL / MIN (howany ulanmak: 5-6kg / cm2)
6. Enjamlaryň ölçegleri: (L) 3500mm (W) 2250mm (H) 2800mm (hakyky ýerleşiş dizaýnyna bagly)
7. Enjamlaryň agramy: 1500 kg


Esasy artykmaçlyk konfigurasiýasy
1. “kaaskawa” markasy servo motor
2. Taýwan markasynyň tizligini peseldiji
3. “Mitsubishi” (Japanaponiýa) PLC
4. Şnaýderde aragatnaşyk we wyklýuçateller ulanylar
5. Omron fotoelektrik datçigi
6. Interfeýs dolandyryş dolandyryş hereketi we duýduryş ýagdaýy we duýduryş funksiýasy
7. kaaskawa markasynyň ýygylyk öwrüjisi
8. Çarçuwaly we gapdal paneller uglerod polatdan ýasalýar
9. Taýwan AirTac pnewmatiki elementleri
10. Italiýanyň PIAB markasy Sucker









